系统优势
系统优势



 技术优势
技术优势
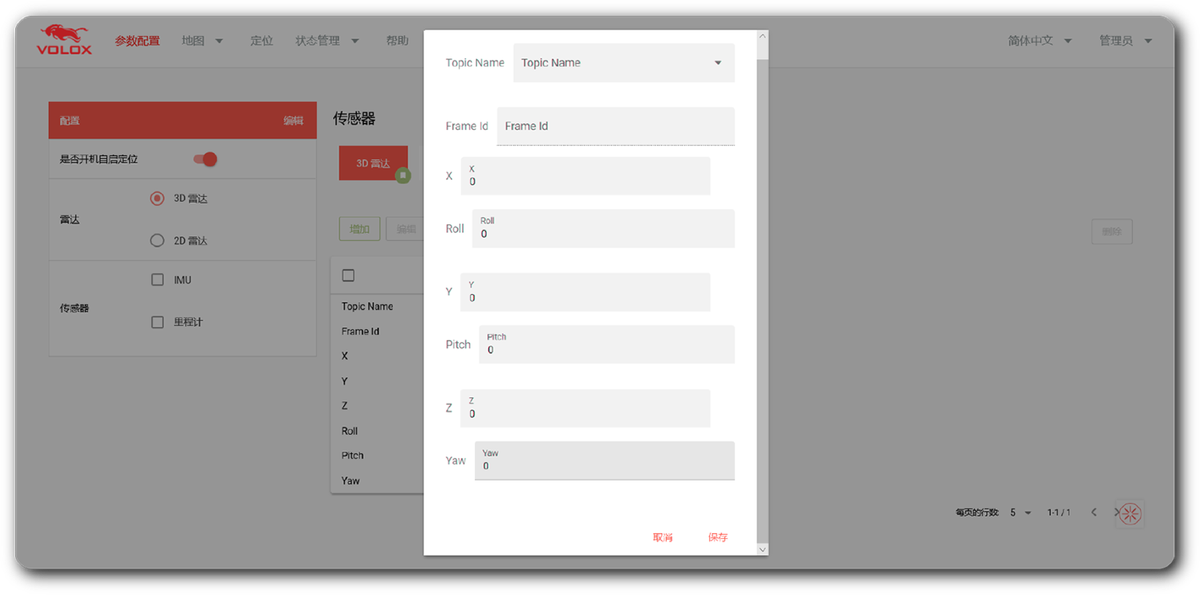
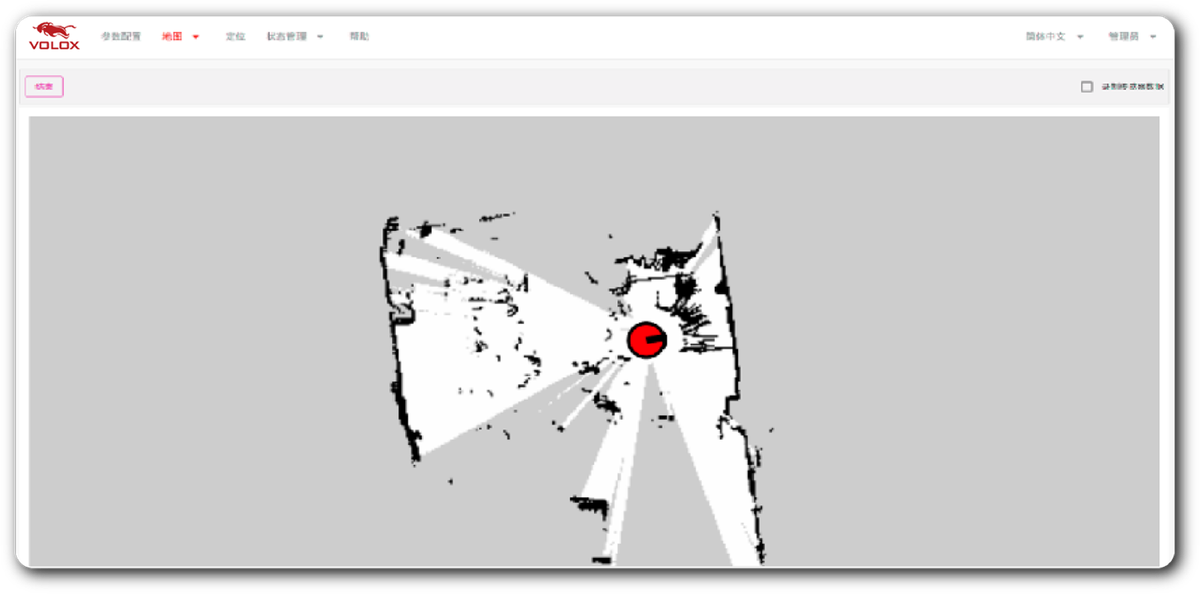
VSLAM自主导航定位系统是针对移动机器人市场推出的一款具有实时动态建图与定位功能的软硬件相结合的产品,基于扩展卡尔曼滤波(EKF)算法、多传感器信息融合技术,具有灵敏的环境感知与卓越的复杂环境适应能力、稳定的地图构建与高鲁棒性的动态高精度定位能力。
13122836111
13917928597
13661829312
15800939755
15901911312
13761903055
13166128597
13681670833
15201992127
15026623687
400—8866—890
021—51879555
安徽省萧县姬村开发区
上海市徐汇区肇嘉浜路446号一号楼(总部)





 应用案例
应用案例