产品介绍
产品介绍
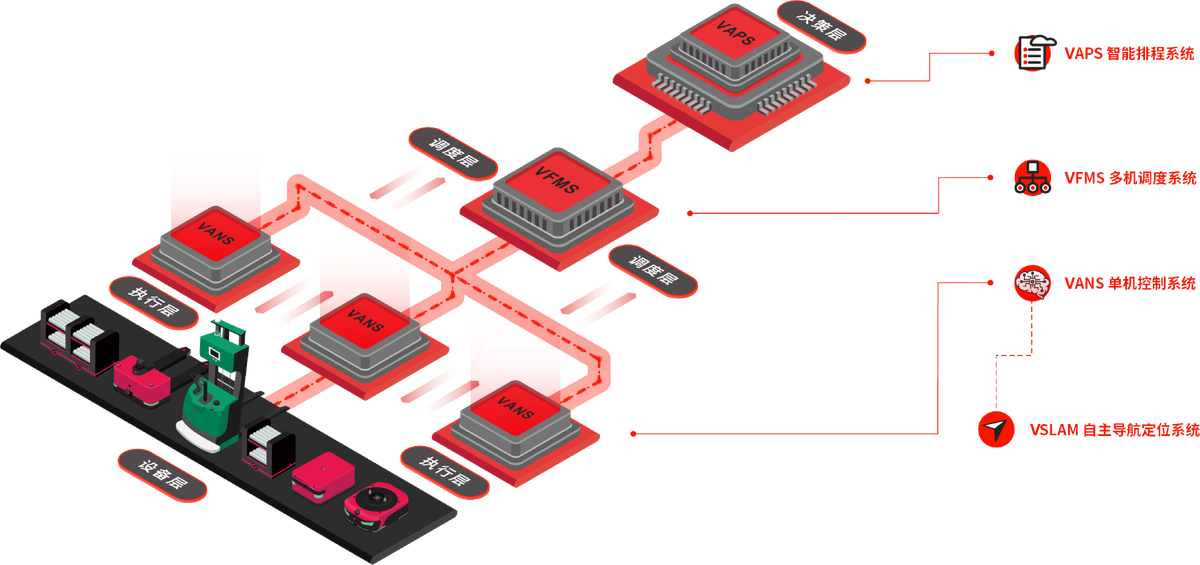
VSLAM自主导航定位系统是针对移动机器人市场推出的一款具有实时动态建图与定位功能的软硬件相结合的产品,基于扩展卡尔曼滤波(EKF)算法、多传感器信息融合技术,具有灵敏的环境感知与卓越的多环境适应能力、稳定的地图构建与高鲁棒性的动态高精度定位能力。

 系统功能
系统功能

通过浏览器访问VSLAM WEB界面可实现跨平台操作,图形化界面使得操作更加便捷。

可融合多传感器,定位精度自然无反可达到+-10mm(视实际场景而定)。

可实时监控系统状态,若出现传感器异常则立马监控并弹窗提示客户,保障工业系统运用的安全性。

UI操作建图,动态实时更新地图状况,使建图更加直观及可视化,提供录制传感器数据功能,便于应对高难度场景时快速寻求售后帮助。

支持单地图多机使用,图形化地图管理使得查看地图信息更加全面,并附加查看地图点云效果及地图原点修改等功能。

VSLAM系统提供人工辅助、预设标记点位、记录关机位置等多种方式快速重定位。操作简单易用,正常开关机皆可自动定位成功,若机器人关机后移动到距离关机点较远的地方,可通过人工辅助的方式进行重定位。
13122836111
13917928597
13661829312
15800939755
15901911312
13761903055
13166128597
13681670833
15201992127
15026623687
400—8866—890
021—51879555
安徽省萧县姬村开发区
上海市徐汇区肇嘉浜路446号一号楼(总部)





 应用案例
应用案例